Hyper-IMU(超级IMU)是一款专业的IMU(惯性测量单元)数据处理与仿真软件,专为工程师、科研人员和爱好者设计,用于模拟和分析IMU数据,支持多种IMU设备的数据采集、处理与可视化。
Hyper-IMU提供了直观的操作界面,支持实时数据捕获、历史数据回放、数据滤波、校准、数据融合以及传感器校正等功能。该软件能够支持多种IMU设备,包括但不限于陀螺仪、加速度计和磁力计等,广泛应用于无人机、机器人、自动驾驶、运动控制等领域。
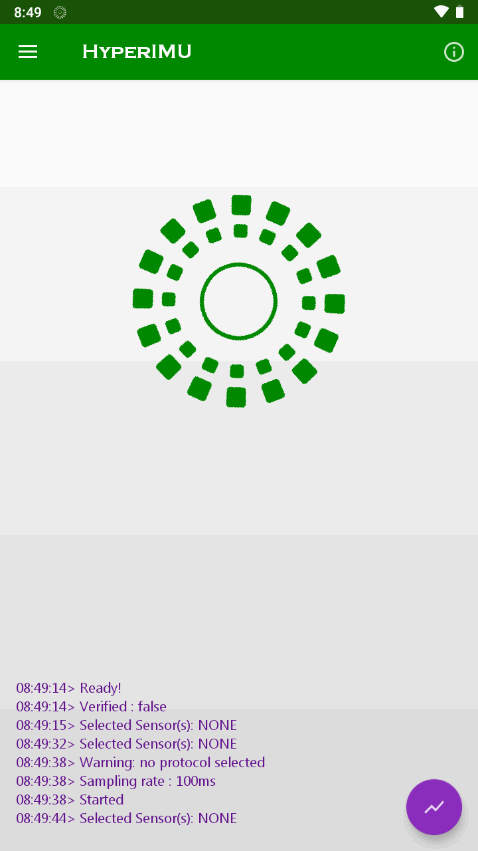
1. 实时数据捕获:通过连接IMU设备,实现实时数据捕获,方便实时监测和分析。
2. 数据滤波:内置多种滤波算法,如卡尔曼滤波、低通滤波等,有效去除噪声,提高数据准确性。
3. 数据可视化:支持三维图形显示,直观展示IMU数据变化,便于理解和分析。
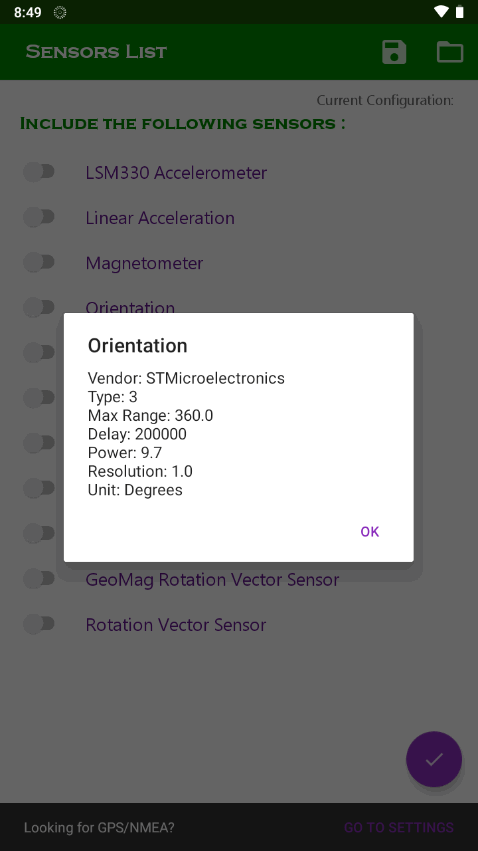
4. 设备校准:提供多种校准工具,帮助用户校准IMU设备,确保数据准确性。
1. 跨平台支持:支持Windows、Linux和Mac OS等多种操作系统。
2. 高度集成:集成了多种传感器数据处理功能,满足用户多样化需求。
3. 开源社区:拥有活跃的开源社区,提供丰富的教程和案例,方便用户学习和使用。
1. 安装与启动:下载并安装软件后,双击启动图标即可打开软件。
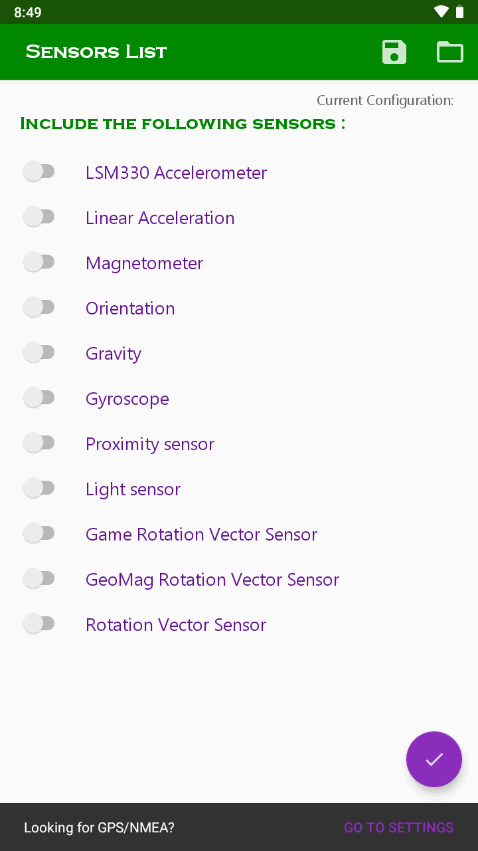
2. 连接设备:通过USB或蓝牙连接IMU设备,软件将自动识别并列出设备信息。
3. 配置参数:在“设置”菜单中配置采样率、滤波算法等参数。
4. 数据采集与处理:点击“开始”按钮开始数据采集,可在“数据”菜单中查看和处理数据。
5. 结果展示:在“可视化”菜单中选择三维图形展示,查看IMU数据变化。
如果您需要一款功能强大且易于使用的IMU数据处理软件,那么Hyper-IMU将是您的理想选择。无论是进行科学研究还是工程应用,它都能助您一臂之力。如需正版下载,请访问官方网站或授权经销商渠道获取最新安装包及详细使用说明。



















































 火焰影视免费版
火焰影视免费版
 火焰影视
火焰影视
 火焰影视app官方
火焰影视app官方
 FM电台软件合集
FM电台软件合集
 DB影院TV盒子
DB影院TV盒子
 DB影院官方版
DB影院官方版
 DB影院
DB影院
 火猫影视所有版本
火猫影视所有版本